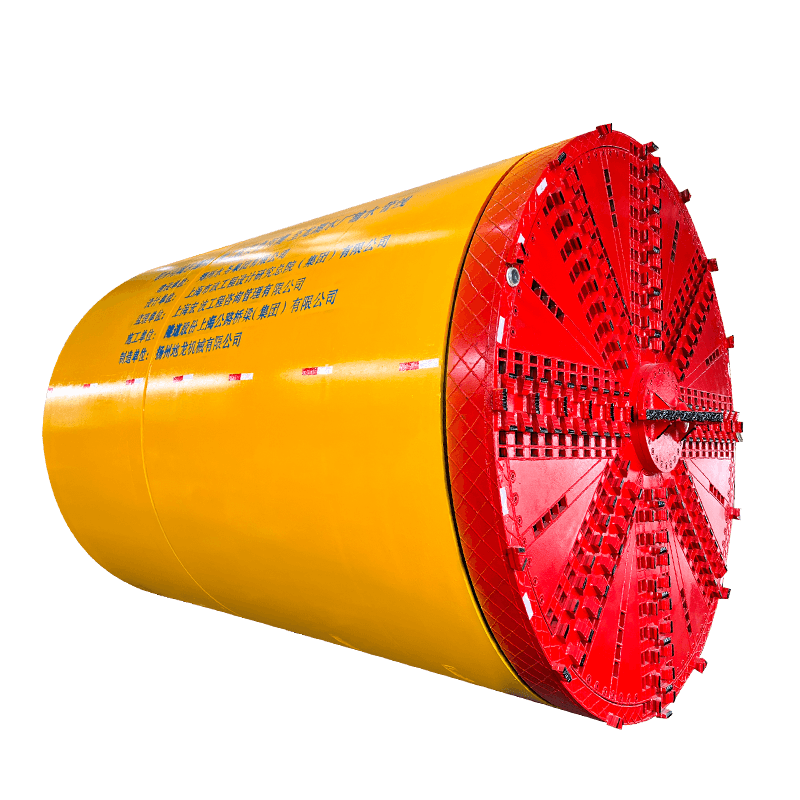

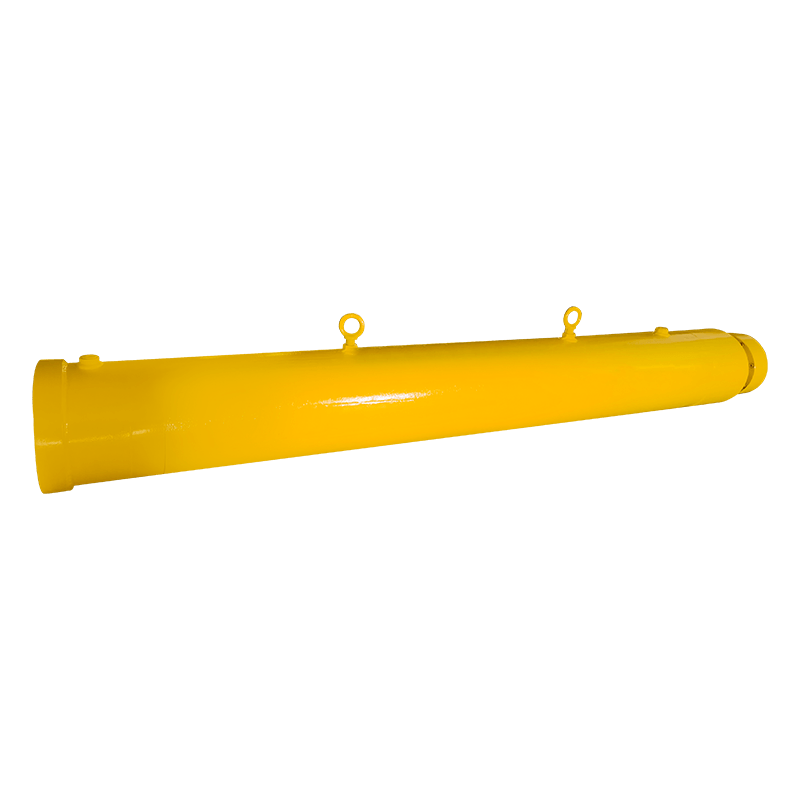


オーガーボーリングマシンの機能と使用場所
オーガーボーリングマシンは、設置ルート全体に沿って開溝を掘削することなく、鋼製ケーシングパイプを土壌に水平に設置するように設計された非開削建設ツールです。この機械は発射ピット内に設置され、回転するらせん状のオーガ (らせん状のブレードを備えたシャフト) を地面の中を前方に駆動しながら、同時にその後ろの鋼製ケーシング パイプを押します。回転するオーガーが切羽の土を切り取って移動させ、掘削した物質をケーシングの内側を通って発射ピットに戻し、そこで収集されて除去されます。その結果、設置されたケーシングパイプは、道路、鉄道、水路、またはその他の表面の障害物の下を、上の表面を乱すことなく通過することができます。
オージェボーリングは、ユーティリティ建設業界で最も広く使用されている非溝設置工法の 1 つです。これは、道路交差点、鉄道線路、および露天掘りが許可されない、または法外に費用がかかる環境に敏感な地域の下に、水道本管、ガスパイプライン、電線管、通信ダクトを設置するための標準的なアプローチです。この方法は、マイクロトンネリングや水平方向掘削などのより複雑な非掘削技術と比較して、幅広い土壌条件にわたる比較的単純さ、機械的信頼性、および費用対効果が高く評価されています。
オーガーボーリングマシンの仕組み: 基本的な力学
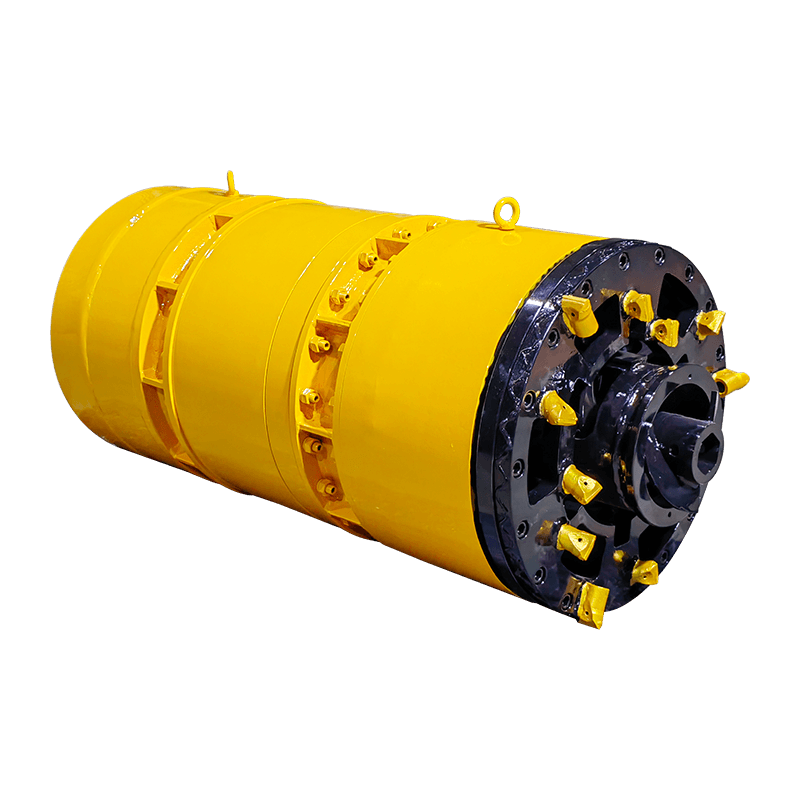
の動作原理 オーガーボーリングマシン これは簡単ですが、詳細を理解することは、マシンが何が得意で、どこに限界があるのかを明確にするのに役立ちます。このプロセスは、計画された設置に適した高さにボーリングマシンを設置する深さまで掘削された発射ピットから始まります。機械は、レーザー誘導または光学測量機器を使用して、必要な穴の方向と勾配に正確に位置合わせされたスチール レール上に配置されます。
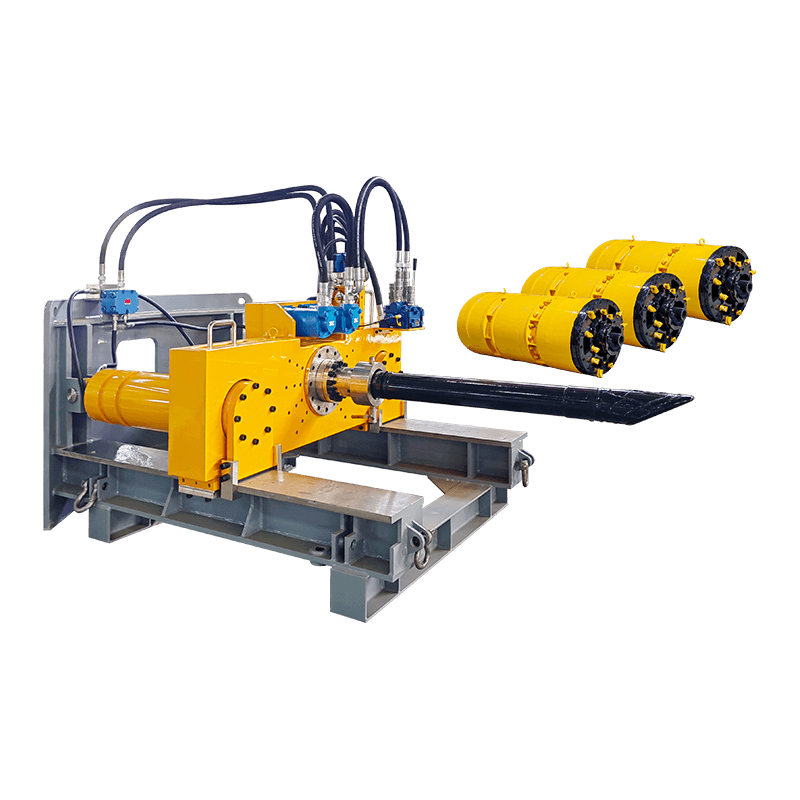
機械の動力ユニット (通常は電気モーターまたは油圧駆動システム) がドライブ チャックを介してオーガ ストリングを回転させ、油圧推力システムがオーガとケーシング アセンブリ全体を土壌の中に押し込みます。オーガストリングの前部にある切断ヘッドが土壌を破壊して緩め、回転するオーガの螺旋状のフライトが掘削物をボーリング穴を通って後方に運び、発射ピットに戻します。スチール製のケーシング パイプは、ボアが進むにつれて先頭パイプの後部に部分的に溶接され、ボーリング マシンとオーガがクロッシングの遠端にある受け入れピットに現れるまで、ケーシング ストリングを段階的に構築していきます。
穴あけが完了すると、オーガーストリングがケーシングから引き抜かれ、鋼製ケーシングパイプが地中の所定の位置に永久に残されます。次に、キャリア パイプ (製品を運ぶ実際のユーティリティ パイプ) がケーシングの穴を通して取り付けられます。ケーシングはキャリアパイプの保護導管として機能し、横断面上の土壌および表面荷重に対する構造的支持を提供します。この二管式方式は、ケーシングを使用せずに製品管を直接設置する方式とは一線を画すオーガボア構造の大きな特徴です。
オージェボーリングマシンの種類
オージェボーリングマシンは、さまざまな設置直径、土壌条件、プロジェクト要件に適したさまざまなサイズと構成で製造されています。主要なカテゴリを理解することは、プロジェクトの特定の要求に機器を適合させるのに役立ちます。
従来型オージェ中ぐり盤
従来のオーガボーリングマシン(トラックマウントユニットまたはクレードルマウントユニットとも呼ばれます)は、ほとんどの道路および公共事業横断プロジェクトの標準構成です。この機械は発射ピット内の鋼製トラックフレームに設置され、ロータリードライブヘッドと油圧推力シリンダーを使用してオーガーとケーシングを同時に前進させます。これらの機械は、約 100 mm から最大 1500 mm 以上のケーシング直径をカバーするサイズが用意されており、スラスト容量は小径機械の 50 トンから大口径設備の 500 トン以上までの範囲に及びます。ドライブヘッドの速度とトルクはケーシングの直径と土壌の状態に合わせて調整され、ほとんどの機械は可変速度制御を備えており、さまざまな地面タイプでの切削性能を最適化します。
パイロットチューブオーガーボーリングシステム
パイロット チューブ オーガ ボーリングは、全直径のオーガ ボアの前に操縦可能なパイロット チューブの取り付け段階を追加する、従来のオーガ ボーリングの強化版です。まず、小径のパイロット チューブがセオドライトまたはカメラ誘導システムを使用して受信ピットに誘導され、正確に位置合わせされたパイロット パスが確立されます。次に、オーガボーリングマシンはパイロットチューブの位置合わせに従い、正しい位置と勾配にケーシングパイプを取り付けます。このアプローチは、従来のオーガーボーリングと比較して、大幅に厳しい設置公差 (通常、計画された位置合わせの ±25mm 以内) を達成するため、重力式下水道の設置や、既存の公共事業の下に厳しいクリアランス要件がある交差点など、正確な勾配制御が必要な用途に適しています。
ロボットオーガーボーリングマシン
ロボットまたは遠隔操作のオーガボーリングマシンは、狭い空間、危険な環境、またはピット内でのオペレータの立ち会いが制限されている場所に設置するように設計されています。これらの機械はリモート コンソールを使用して地上から制御され、カメラ システムと電子モニタリングが組み込まれているため、オペレーターは発射ピットにいなくてもボアを管理できます。ロボットオーガーボーリング装置は、環境に敏感な地域、汚染された地面、または従来の有人ピット作業を妨げるアクセスが制限されているプロジェクトでの横断に特に関連しています。
コンパクトなスキッドマウントマシン
コンパクトなスキッドマウントオーガーボーリングマシンは、ピットサイズとアクセスの制約によりフルサイズの機器の使用が制限される制限された都市環境での、より小さな直径の設置(通常はケーシング直径 100mm ~ 600mm)向けに設計されています。これらの機械は、従来のトラックに設置されたユニットよりも物理的な設置面積が小さく、必要な発射ピットが浅く、場所間の移動や設置がより迅速に行えます。これらは一般的に、掘削が中断されアクセスが制限されている都市道路下の公共事業接続、電気通信管路の交差、小規模な水道およびガスの本管設備に使用されます。
土壌条件: オージェボーリングが機能する場所と機能しない場所
土壌の状態は、オーガーボーリングが特定の交差点に適切な方法であるかどうか、およびどのような特定の機器とカッティングヘッド構成が必要になるかを決定する最も重要な要素です。オージェボーリングは幅広い種類の土壌で良好に機能しますが、プロジェクト計画時に慎重に評価する必要がある特定の制限があります。
| 土壌の種類 | 適合性 | 代表的なカッティングヘッド | 主な考慮事項 |
| 粘土粘土 | 素晴らしい | クレイオーガー/バレットヘッド | 粘着性のある土壌では腐敗物の管理が必要になる場合があります。良好なボア安定性 |
| 砂質土壌 | 良い | サンドオーガ・カッターヘッド | 乾燥した凝集性のない砂では面が崩壊する危険性があります。水の流入管理が必要 |
| 砂利と丸石 | 中等度 | ロックオーガ/超硬チップ | 丸石は逸脱を引き起こす可能性があります。特大オーガーが必要になる場合があります |
| 軟岩・風化岩 | 中等度 | 超硬インサート付きロックオーガー | 高いトルク要求。オーガーとカッティングヘッドの摩耗率が大幅に増加 |
| ハードロック | 悪い~不適切 | 通常は使用されません | トルクと推力の要求は通常、実際の機械の限界を超えます。代替方法が好ましい |
| 混合面(土と岩) | 挑戦的 | 岩石/土頭の組み合わせ | 可変トルクと推力。逸脱リスクの増加。厳重な監視が必要 |
| 飽和した緩い砂(地下水面以下) | 難しい | 圧力制御付き密閉型カッティングヘッド | 地面の脱水またはグラウト注入が必要になる場合があります。重大な顔面不安定リスク |
オーガボーリングにおける最も一般的な故障モードは、計画された位置合わせからの逸脱です。つまり、土壌の変動、障害物、または不適切な機械のセットアップにより、ボアがラインまたは勾配から外れてしまいます。一貫した特性を持つ粘性土壌は、穴の方向を維持するという点で最も寛容です。粒状の土壌、混合面の状態、および岩や丸石を含む地面では、逸脱のリスクが大幅に増加するため、ボア全体でより厳密な位置合わせの監視が必要になります。
オージェとケーシングの仕様: ご注文前に理解していただきたいこと
オーガとケーシングの仕様は、オーガボーリングマシンが何を設置できるか、および特定の地盤条件でどのように機能するかを定義する技術パラメータです。これらの仕様を正しく取得することは、設置を成功させるための基本です。過小なオーガでは土壌条件に応じたトルク容量が不足し、機械の推力容量に適合しないケーシングは完成前にボアを座屈させたり失速させたりします。
オージェフライトの設計と直径
オーガーフライト (中心シャフトの周りに巻き付けられた螺旋状のブレード) は、切り粉を詰まらせることなく後方に搬送するのに十分なクリアランスを持ってケーシング直径内を走行できるサイズでなければなりません。標準的なオーガーの外径は通常、公称ケーシング内径よりも 10 ~ 25 mm 小さく、切粉を輸送するための環状スペースを提供します。飛行ピッチ (連続するらせん回転間の距離) は、切粉がオーガに沿って効率的に移動するかどうかに影響します。ピッチが狭いほど、緩い流動土壌ではより効果的です。ピッチが広いと、粘土がフライトに詰まって詰まりを引き起こす傾向が減り、粘着性のある粘性土壌をより適切に処理できます。
オーガシャフトトルク容量
オーガーシャフトは、土壌を切断し、切りくずをねじれや破損なしに発射ピットに戻すのに必要な回転トルクを伝達できなければなりません。トルク要求は、穴の直径、土の強度、ケーシングの長さ、穴の上の土の覆いの深さに応じて増加します。硬い土壌に長い穴を掘る場合、オーガシャフトに要求される累積トルクは、面での切削抵抗と穴の全長に沿った切粉の摩擦の両方を克服する必要があり、非常に大きくなる可能性があります。オージェボーリングマシンのメーカーは、特定の土壌条件における自社機器のトルク定格を公表しているため、機器の選択を確定する前に、これらを予想トルク需要の地質工学的評価と比較する必要があります。
ケーシングの壁の厚さとグレード
オーガボア設置用の鋼製ケーシングパイプは、ボーリングマシンによって加えられる圧縮スラスト力に座屈することなく耐えられる十分な壁厚と、設置後に加えられる土壌および表面荷重を支えるのに十分な構造容量を備えていなければなりません。オーガボアケーシングの最小肉厚は通常、設置推力要件によって決まり、一般に API 5L または同等の構造用鋼グレードが指定されます。高速道路や鉄道の重い荷重の下にある交差点の場合は、永続的な使用荷重条件に基づいて追加の壁厚の計算が必要です。ケーシングの接合部は通常、設置中にピット内で突合せ溶接されます。溶接の品質は、設置荷重と使用荷重の両方で完成したケーシングストリングの構造的完全性に直接影響します。
Launch Pit の要件とセットアップ
発射ピットは、オーガーボーリングマシンが稼働する作業プラットフォームであり、その設計と構造は、マシン自体と同様に設置の成功にとって重要です。不適切なサイズの発射ピットや不十分な建設の発射ピットは、オーガボアの建設中に問題が発生する最も一般的な原因の 1 つです。不安定なピットの壁が崩れてボアを塞ぐ可能性があり、ピットが短すぎると機械のストロークを完全に利用できず、設置効率が低下します。
- ピット長さ: 発射ピットは、ボーリングマシンの長さにケーシングパイプの 1 セクションの長さを加え、オペレーターと装置の作業スペースを加えたものを収容できる十分な長さが必要です。特定の機械の要件とケーシングの長さは異なりますが、機械の長さにケーシングのパイプ接合部の長さの 1.5 ~ 2 倍を加えた最小ピット長が一般的な計画ルールです。ピットが長いと、新しいケーシング セクションを追加するために停止する前に各押しストロークを最大化することで、より効率的な操作が可能になります。
- ピット幅: ピット幅は、アクセスおよび操作のために両側に十分なスペースを確保して機械をトラック フレーム上に配置できるようにする必要があります。通常、機械フレームの両側に最低 600 mm の作業スペースが必要ですが、ケーシングの取り扱い、腐敗物の除去、および安全性への準拠のために追加の幅が必要です。また、ピットは、地面の動きや機器の故障が発生した場合に、作業員が緊急脱出できるように十分な幅を持たなければなりません。
- ピットの深さと機械の高さ: ピットの深さは、ケーシング中心線の必要な設置深さによって決まります。機械は、ピット床からの機械自体の高さを考慮して、ボアが正しい深さと勾配に配置される高さに配置する必要があります。発射フレーム上の機械の高さを正確に設定することが重要です。機械の高さの誤差は、ボーリングが開始されると修正できない最終的な設置深さの誤差に直接変換されます。
- ピットサポートと支保工: 発射ピットは、機械の稼働中に壁が崩壊しないように、支えられるか支えられなければなりません。ボーリングマシンによって発生する振動は、ピット壁にかかる機械の重量による追加荷重と組み合わされて、安定した地盤であっても支持されていない掘削を不安定にする可能性のある状態を作り出します。鋼板杭、トレンチボックス、または人工木材支保工が標準的な支持方法であり、支保工の設計では、ピットヘッドウォールを押すボーリングマシンのスラストシステムによって生成される反力を考慮する必要があります。
- 突っ張り壁構造: ボーリングマシンの油圧スラストシリンダーは、発射ピット後部のスラスト壁を押します。通常は、スラスト力を周囲の地面に分散するように設計された鉄筋コンクリート構造または鋼板ベアリングシステムです。スラスト壁は、動いたり故障したりすることなく、ボーリングマシンの全定格スラスト容量に耐えることができなければなりません。ボーリング中にスラスト壁が動くと、機械のアライメントがずれ、修正できない穴のずれが生じる可能性があります。
オーガボーリングにおけるアライメント管理と精度
オーガボア全体にわたって計画された水平方向および垂直方向の位置合わせを維持することは、この方法の主な技術的課題の 1 つです。水平方向掘削やマイクロトンネル掘削などの操縦可能なトレンチレス工法とは異なり、従来のオーガーボーリングにはアクティブな操縦機構がありません。いったんボーリングが開始されると、計画されたラインや勾配からの逸脱をそのボーリング中に修正することはできません。このため、穴あけ前の設定精度と穴あけ中のリアルタイム監視が、許容可能な設置を実現するために重要になります。
機械のアライメントは、発射ピットに設置されたレーザーレベルまたは光学測量機器を使用して、ボーリングを開始する前に設定されます。レーザービームは計画されたボア中心線を定義し、トラックフレーム上の調整可能なサポートジャッキを使用して機械のドライブヘッドがそれに一致するように位置合わせされます。この初期設定の精度は、達成可能な設置公差を直接決定します。良好な地面条件で適切に設定された機械は、従来のボーリング装置を使用した場合は 20 ~ 40 メートルの一般的な道路横断長にわたって ±50 mm 以内、パイロット チューブ ガイダンス システムを使用した場合は ±25 mm 以内の水平および垂直精度を達成できます。
ボーリング中、カメラシステム、測量機器、またはボア内に取り付けられトランジットを通して観察されるターゲットを使用して、カッティングヘッドまたは先頭ケーシングパイプの位置を追跡することにより、アライメントが監視されます。逸脱が検出された場合は、続行する前に、考えられる原因 (土壌の変動、障害物、機械の振動の影響) を検討する必要があります。従来のオーガボーリング用途のほとんどでは、偏差が発生すると修正する能力が限られています。そのため、早期に検出し、過剰な偏差が蓄積する前にボアを放棄して再設計する決定をした方が、すでに公差から大幅に逸脱しているボアを継続するよりもコスト効率が高いことがよくあります。
オージェボーリングと他のトレンチレス工法との比較
オージェボーリングは、公共施設の横断歩道で利用できるいくつかの非溝なし設置方法の 1 つであり、どの方法を選択するかは、設置直径、横断長、土壌状態、精度要件、プロジェクト予算などの要因によって異なります。オーガーボーリングが主な代替方法とどのように比較されるかを理解することは、プロジェクト計画中に情報に基づいた方法を選択するのに役立ちます。
- オージェボーリング vs. 水平方向ドリリング (HDD): HDD は、操縦可能なドリルストリングと流体支援掘削を使用して、湾曲したプロファイルに沿ってパイプを設置し、設置経路での水平曲線と垂直曲線の両方を許容します。 HDD は設置形状の点でより柔軟であり、オーガボーリングよりも長い交差長さを実現できます。しかし、HDD はより特殊な機器と専門知識を必要とし、掘削液との相互作用が不十分な粘性粘土では効果が低く、鋼製のケーシングは設置されず、製品パイプが直接引っ張られます。オージェボーリングは一般に、設計または仕様によって鋼製ケーシングが必要とされる粘性地盤内の短くて直線的な横断の場合により費用効果が高くなります。
- オージェボーリングとマイクロトンネリング: マイクロトンネリングでは、アクティブステアリング機能、スラリーパイプラインを介した継続的なスポイル除去、およびリアルタイムの位置監視を備えた遠隔操作のトンネルマシンを使用して、非常に高い位置合わせ公差(通常は±10〜25mm)でパイプを設置します。大口径の設置、長い交差点、重力式下水道などの精密な勾配制御が必要な用途に適しています。その代償として、オーガボーリングに比べて設備コストと運用の複雑さが大幅に高くなります。オージェボーリングは、設置公差が従来の装置で満たされ、交差長さと直径が実際の方法の範囲内にある場合に推奨されます。
- オージェボーリング vs. パイプラミング: パイプラミングでは、回転オーガーではなく空気圧インパクトハンマーを使用して、スチールケーシングを地面に打ち込みます。インパクトハンマー以外に発射ピットの機械は必要なく、セットアップがより速く、オーガーボーリングで問題を引き起こす一部の地面条件、特に岩や丸石のある地面条件に対処できます。制限は、パイプ打ち込みでは設置中に積極的な土壌除去ができないことです。つまり、土壌は掘削されるのではなく、ケーシングの周囲で圧縮されます。これにより、表面沈下が発生する可能性があり、すべての地盤条件に適しているわけではありません。オーガー ボーリングでは、オーガー フライトを通じて継続的に土壌を除去するため、パイプ突き固めに比べて地表沈下のリスクが軽減され、敏感な地表環境に適しています。
オーガボーリングマシンを選択する際に評価すべき重要な要素
プロジェクトに適切なオーガボーリングマシンを選択するには、動員コストを増加させる不必要に装置を大型化することなく、予想される条件に十分な能力を提供する方法で、マシンの機能を特定の設置要件に適合させる必要があります。以下の要素は、機器の選択時に評価する重要な仕様パラメータを表しています。
- 最大ケーシング径と内径範囲: 機械は、存在する土壌条件を通じて必要なケーシング直径を駆動できなければなりません。機械のドライブ チャック、トラック フレーム幅、およびオーガーの能力が、同じ契約上の異なるクロス間の変動を含め、プロジェクト全体で必要な直径の全範囲をカバーしていることを確認します。
- 最大推力: 機械の推力容量は、ケーシングの直径、交差長さ、土壌摩擦パラメータ、およびボア経路に沿って予想される障害物に基づいて計算される、予想される最大設置推力を超える必要があります。土壌条件の変動や予期せぬ抵抗を考慮して機械の推力容量を選択する場合は、計算された設置推力に最小安全係数 1.5 を適用します。
- トルク出力と速度範囲: ドライブヘッドのトルクは、切削抵抗に抗してオーガーストリングを回転させるのに十分であり、ボア全長にわたって切削粉の輸送摩擦が発生する必要があります。可変速度制御により、オペレータは、可変地盤内でボーリングが進む際に、さまざまな土壌の種類や条件に合わせて回転速度を最適化できます。
- ストローク長さ: 機械の油圧ストローク長によって、押しサイクルごとにケーシングがどれだけ前進するかが決まります。ストロークの長い機械では、サイクルごとにより多くのケーシングが前進し、新しいケーシング セクションを追加するための停止頻度が減り、生産率が向上します。ストローク長は、使用可能なピット長さおよび設置するケーシングパイプの継手長さに合わせてください。
- 電源要件: 機械が電気、油圧、ディーゼルのいずれの動力で動作するか、また必要な電源がプロジェクト現場で利用可能であることを確認してください。騒音や排気ガスの理由から、電動機械は都市部で好まれますが、適切な電源接続が必要です。ディーゼル駆動の機械はより自己完結型ですが、排気と騒音が発生するため、敏感な環境では軽減が必要になる場合があります。
- ガイダンスシステムの互換性: 機械がプロジェクトの仕様で要求される誘導システム (レーザー、光学、カメラ、またはパイロット チューブ誘導) と互換性があるかどうか、また、予想される地盤条件で選択した機械と誘導の組み合わせで必要な精度が達成可能かどうかを確認します。







